OctoGrasp: The Cephalopod-Inspired Prosthetic Arm
Daniel SiegelSummary
OctoGrasp is a prosthetic arm inspired by octopus suckers. It uses suction and flexible joints to improve grip and dexterity. The arm is lightweight, affordable, and performs better than most high-cost prosthetics.
Key Metrics
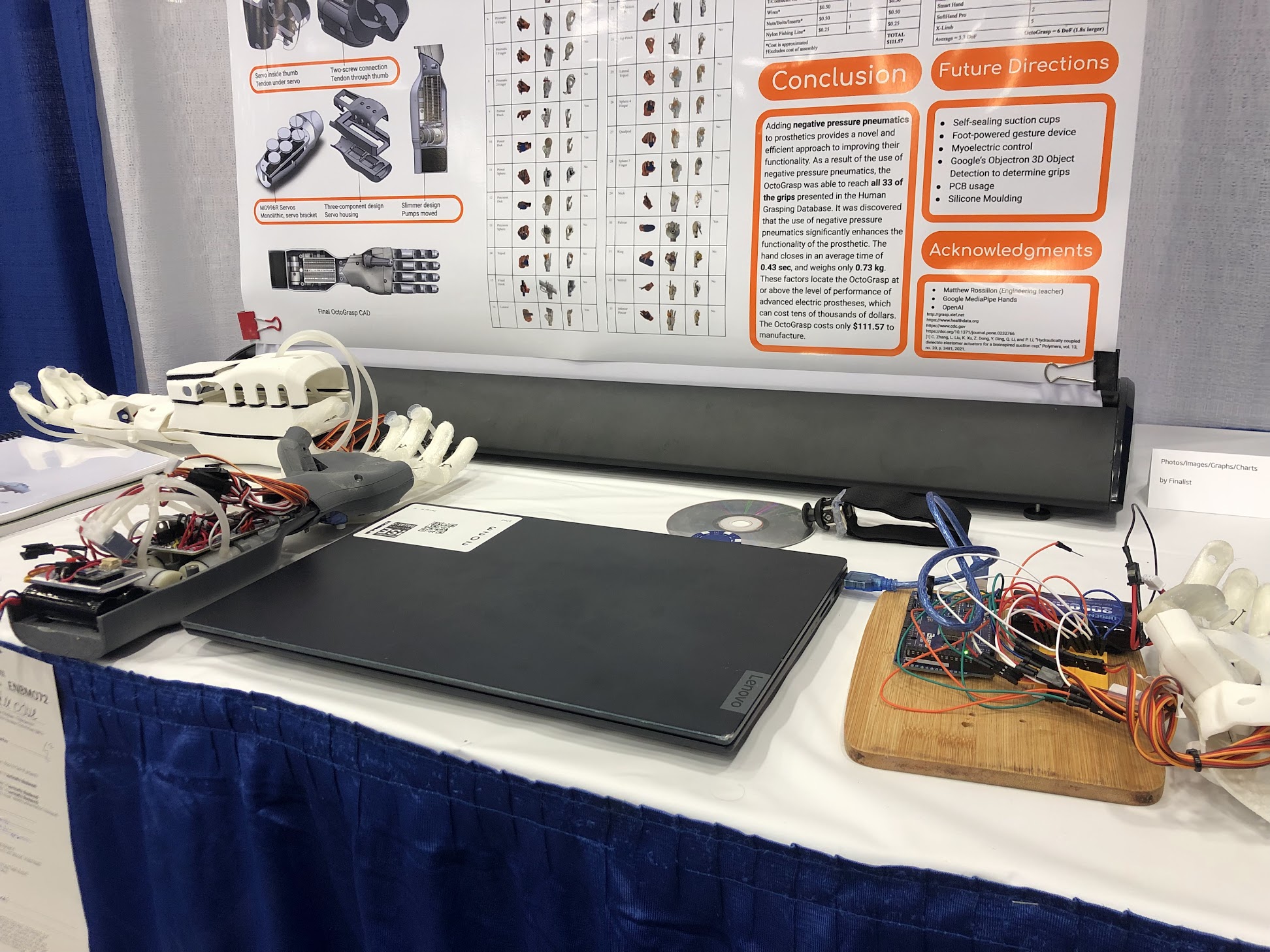
- Cost: $111.57, ~1% of typical prosthetics ($10,000+).
- Speed: 0.43 seconds per grip, 3.6x faster than competitors.
- Dexterity: Matches all 33 grips in the Human Grasping Database.
- Flexibility: Six degrees of freedom, 1.8x more than average.
Design and Process
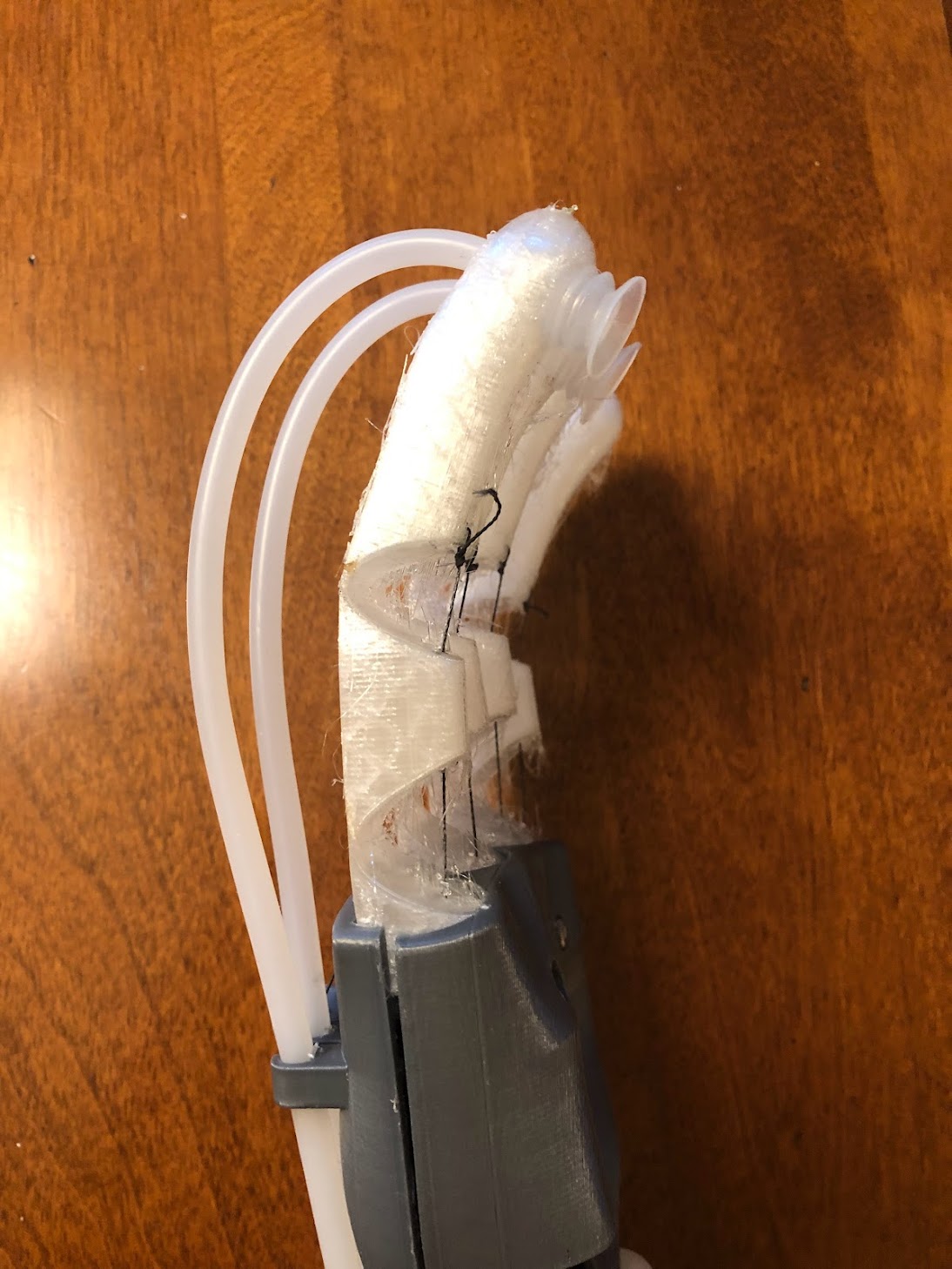
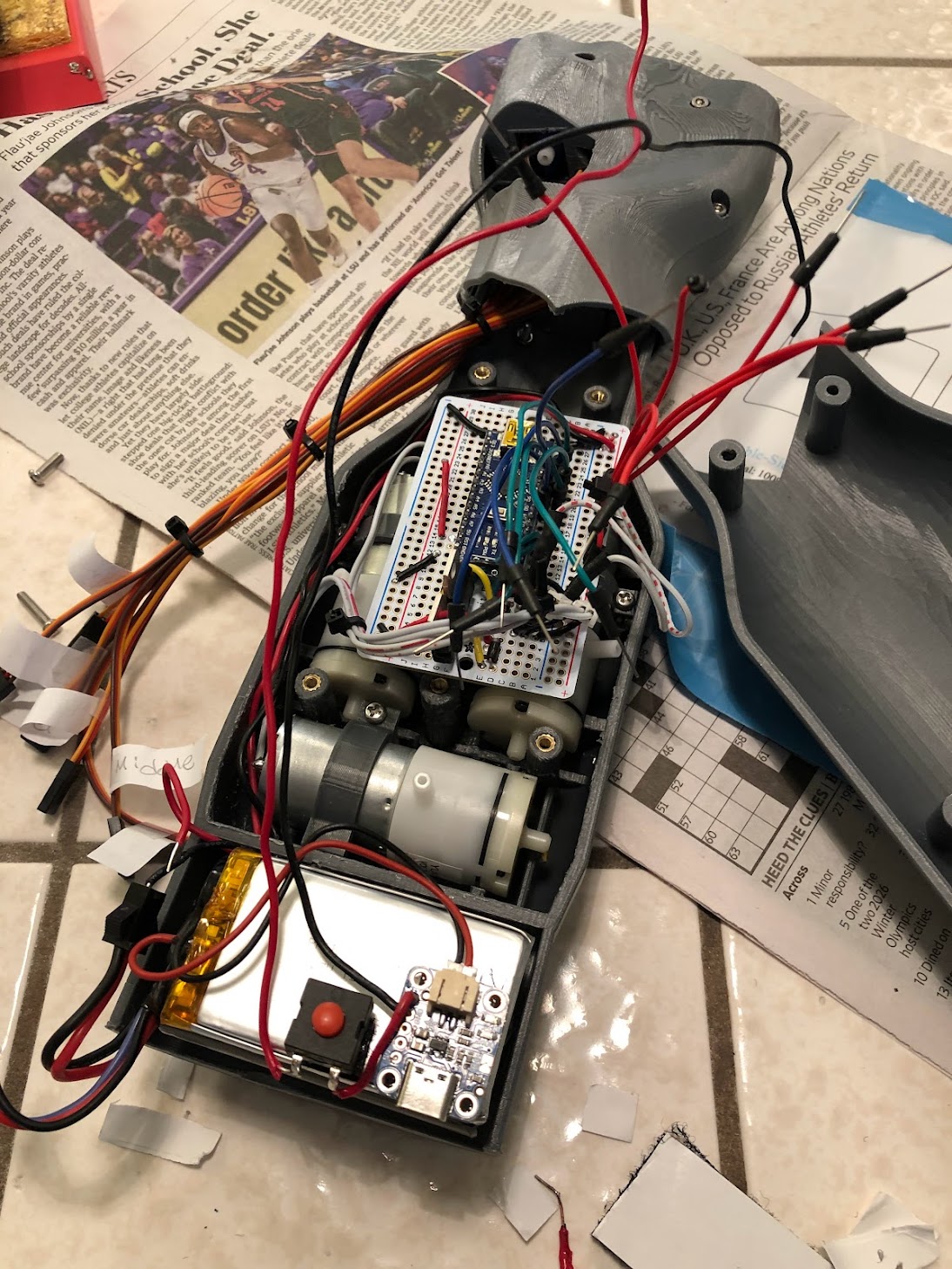
I built OctoGrasp with pneumatic pumps that control suction cups, allowing it to securely hold objects of various shapes and sizes, just like an octopus. To make the fingers bend naturally, I used TPU (thermoplastic polyurethane), which also kept the design simple and affordable. I programmed the control system using an Arduino Nano, letting it work with either a joystick or camera input for easy operation. Over six months, I spent 300–500 hours refining the design, iterating through 20+ prototypes to improve its functionality and usability.
Awards
- ISEF 2023: Grand Award in Biomedical Engineering.
- California Science Fair: Top Prize.
- Synopsys Silicon Valley Science Fair: Grand Prize, IEEE Prize, IBM Prize, Naval Research Prize.
Learn more: OctoGrasp Project Page.
.jpg)