Stanford Schnitzer Lab: Axial & Rotational Manipulator Mounts
Daniel SiegelSummary
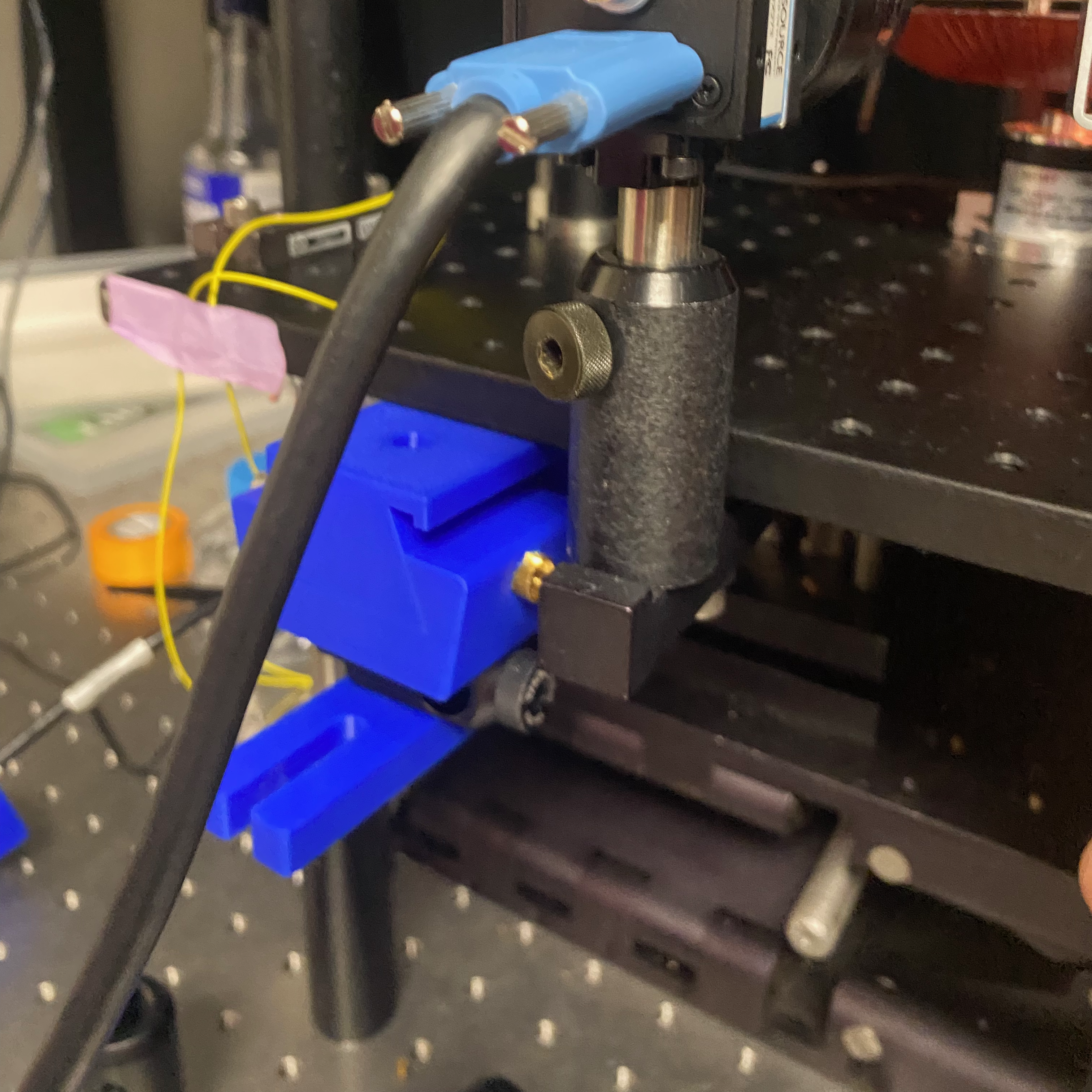
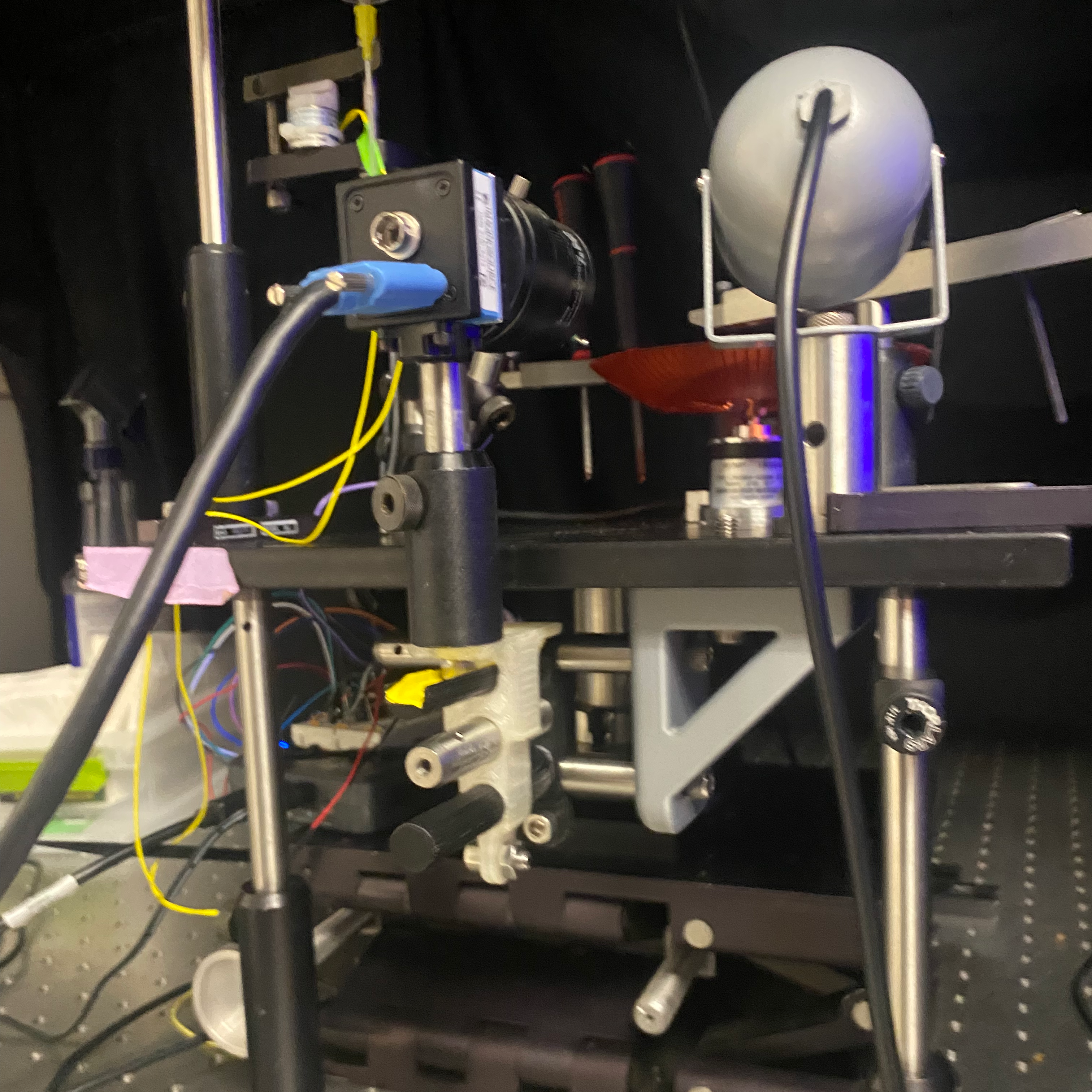
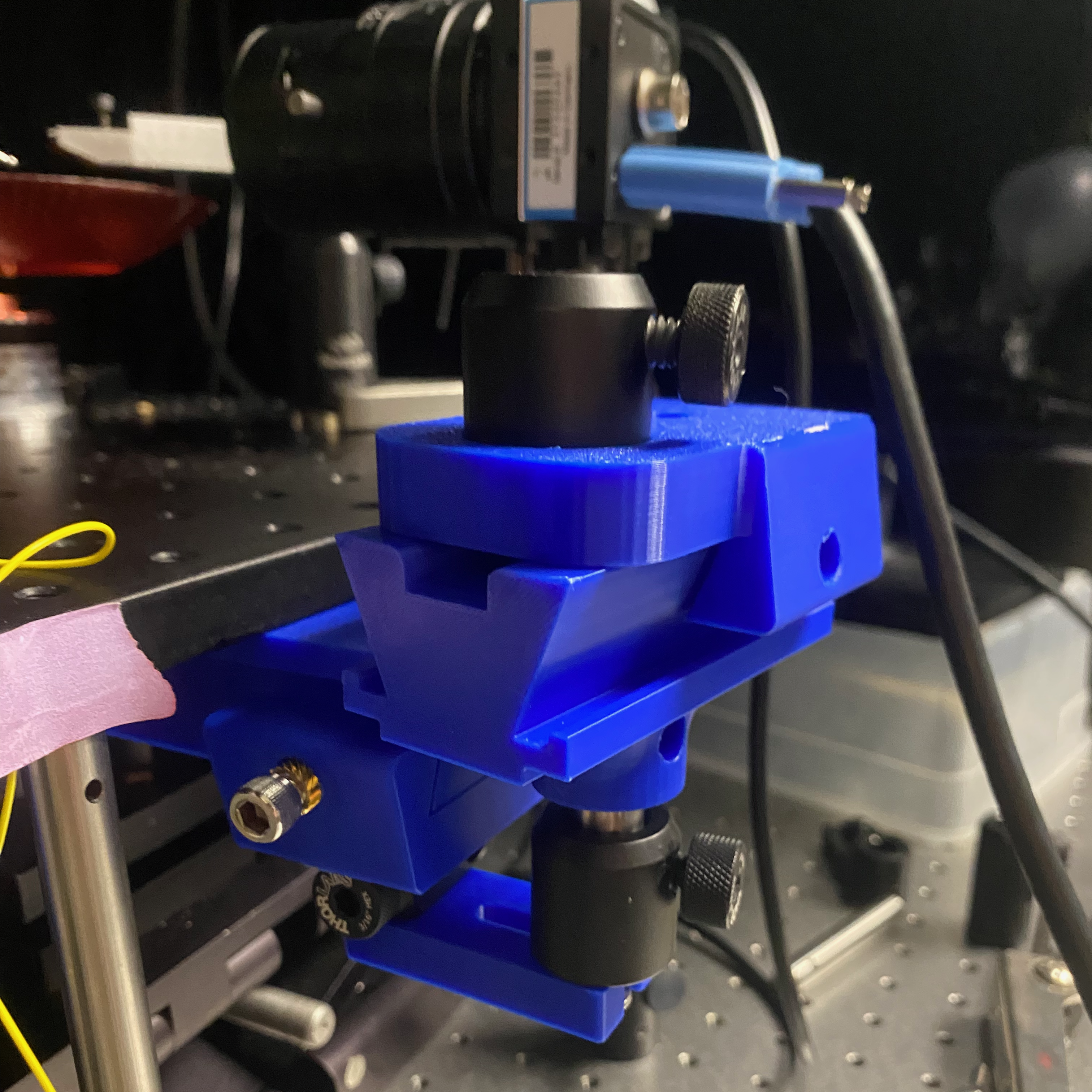
At Mark Schnitzer’s Lab at Stanford University, I designed axial and rotational manipulator adjustable mount prototypes, iterating through 10 different designs over several months. The project focused on tight tolerances for FDM 3D printing, ensuring precise fits, modularity, and variability—critical for stable yet adjustable manipulation.
Much of my work refined the securing system, balancing rigidity in fixed states with adjustability in dynamic configurations. Each iteration tested improvements in locking mechanisms, rotational stability, and modular adaptations, making the system more reliable and easier to integrate.